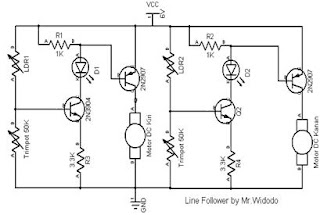
Pada rangkaian ini robot bekerja dengan menggunakan sensor LDR ( Light Dependent Resistor) sebagai penapak garisnya.. berikut adalah gambar rangkaiannya:
- 2 buah sensor cahaya LDR
- PCB IC bolong
- 2 buah transistor 2N3904
- 2 buah transistor 2N2907
- 2 buah Trimpot/potensiometer 50k-100k
- 2 buah resistor 3.3K
- 2 buah resistor 1K
- 2 buah LED (Light Emiting Dioda)
- Spacer (kaki PCB)
- Acrilic body robot ukuran diameter 20 cm.
- Solder, timah solder dan kabel secukupnya
- Kotak baterai 6V
- Roda bekas penghilang BB REXONA
- Bor PCB
- Lem Lilin
- Multitester analog /digital
- 2 buah motor DC dengan gearbox GT1 dan roda untuk GT1atau dpat menggunakan 2 buah motor DC dengan gearbox GT5 dan rubber Wheel untuk GT5 (lebih bagus)
perakitan:
Langkah-langkah untuk merakit robot ini sebagai berikut :
1. Siapkan PCB IC bolong, lalu pasang dan solderlah komponen sesuai rangkaian diatas.
Rangkaian Robot Line follower pada intinya ialah 2 buah motor DC yang aktif berdasarkan input dari sensor LDR, jika LDR mendeksi garis putih (terang) dan garis hitam(gelap) maka akan ada perubahan nilai hambatan pada LDR tersebut, yang akan mengaktif/menonaktifkan transistor 2N3904. Untuk mengatur input tegangan ke basis agar dapat membuat transistor 2N3904 saturasi, maka digunakan pembagi tegangan, dalam hal ini trimpot / potensiometer 50k-100k. Perubahan logika pada transistor 2N3904 juga akan menyebabkan LED menyala atau mati, sebagai indikator apakah LDR membaca garis hitam/putih. Perubahan logika pada kaki kolektor 2N3904 juga sebagai input pada basis 2N2907, yang akan mengaktifkan/menonaktifkan motor DC, dimana transistor 2N2907 merupakan transistor switching standar.
komponen-komponen yang dibutuhkan:- 2 buah sensor cahaya LDR
- PCB IC bolong
- 2 buah transistor 2N3904
- 2 buah transistor 2N2907
- 2 buah Trimpot/potensiometer 50k-100k
- 2 buah resistor 3.3K
- 2 buah resistor 1K
- 2 buah LED (Light Emiting Dioda)
- Spacer (kaki PCB)
- Acrilic body robot ukuran diameter 20 cm.
- Solder, timah solder dan kabel secukupnya
- Kotak baterai 6V
- Roda bekas penghilang BB REXONA
- Bor PCB
- Lem Lilin
- Multitester analog /digital
- 2 buah motor DC dengan gearbox GT1 dan roda untuk GT1atau dpat menggunakan 2 buah motor DC dengan gearbox GT5 dan rubber Wheel untuk GT5 (lebih bagus)
perakitan:
Langkah-langkah untuk merakit robot ini sebagai berikut :
1. Siapkan PCB IC bolong, lalu pasang dan solderlah komponen sesuai rangkaian diatas.
2. Beri tegangan 6V, atur pemberian cahaya pada LDR tersebut dengan membuka atau menutup permukaan LDR tersebut dengan jari atau kertas, atur trimpot/potensiometer sehingga hasilnya optimal. Bagian ini ialah bagian yang paling kritis di dalam pembuatan robo tini, karena kalau tuning tidak tepat, aka robot beralan tidak sesuai jalur yang dibuat.
3. Pasanglah PCB dan pendukungnya pada acrilic. Hubungkan kabel motor DC ke keluaran PCB. Hubungkan baterai 6V ke input Supply PCB.
4. Jika sudah dirakit cobalah jalankan pada lantai yang sudah dipasang jalur hitam berkelok (dapat menggunakan lakban), maka robot akan beralan mengikuti jalur tersebut. Jika sensor kurang sensitif, putarlah perlahan-lahan trimpot/potensiometer robot tersebut, untuk hasil yang optimal. Pastikan sensor LDR berada cukup dekat dengan lantai. Jika putaran motor terlalu cepat, Anda dapat mengatur besar tegangan motor DC tersebut, misal menggunakan IC variabel regulator LM317.
SELAMAT MENCOBA......!!!!!
SELAMAT MENCOBA......!!!!!
